
银河网站平台固定工具测量
一、银河网站平台固定工具测量概要
1、固定工具的测量分为2步:
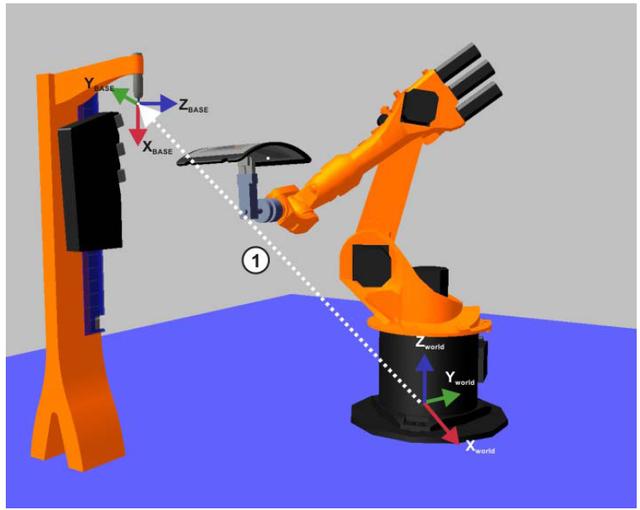
(1)确定固定工具的外部TCP和世界坐标系原点之间的距离。
(2)根据外部 TCP 确定该坐标系姿态。
如图所示,以 $WORLD (或者 $ROBROOT)为基准管理外部TCP,即等同于基坐标系。
二、测量说明:
1、确定TCP时需要一个由机器人引导的已测工具。

2、确定姿态时要将法兰的坐标系校准至平行与新的坐标系。 有两种方式:
(1)5D: 只将固定刀具的作业方向告知机器人控制器。该作业方向被默认为 X 轴。其它轴的姿态将由系统确定,对用户来说,不是很容易地就能识别。
(2) 6D: 所有3个轴的姿态都将告知机器人控制系统。测量说明确定 TCP时需要一个由机器人引导。
三、操作步骤
1、在主菜单中选择投入运行 > 测量 > 固定工具 > 工具。
2、为固定工具指定一个号码和一个名称。用继续键确认。
3、输入所用参考工具的编号。用继续键确认。
4、在5D/6D 栏中选择一种规格。用继续键确认。
5、用已测量工具的TCP移至固定工具的TCP。点击测量。用以确认位置。
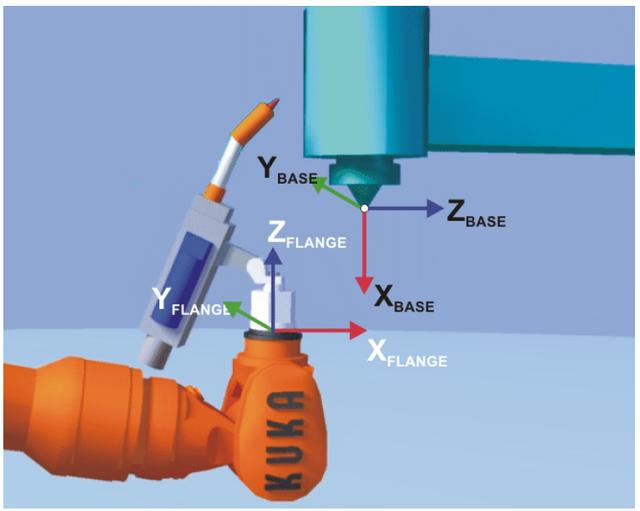
6、如果选择了5D:将 +X 基坐标系平行对准 -Z 法兰坐标系。(也就是将连接法兰调整成与固定工具的作业方向垂直。)如果选择了6D:应对连接法兰进行调整,使得它的轴平行于固定工具的轴:
(1)+X 基坐标系平行于 -Z 法兰坐标系(也就是将连接法兰调整成与工具的作业方向垂直。)
(2) +Y 基坐标系平行于 +Y 法兰坐标系
(3) +Z 基坐标系平行于 +X 法兰坐标系
7、点击测量。 用是确认位置。
8、按下保存键。
1、固定工具的测量分为2步:
(1)确定固定工具的外部TCP和世界坐标系原点之间的距离。
(2)根据外部 TCP 确定该坐标系姿态。
如图所示,以 $WORLD (或者 $ROBROOT)为基准管理外部TCP,即等同于基坐标系。
二、测量说明:
1、确定TCP时需要一个由机器人引导的已测工具。
2、确定姿态时要将法兰的坐标系校准至平行与新的坐标系。 有两种方式:
(1)5D: 只将固定刀具的作业方向告知机器人控制器。该作业方向被默认为 X 轴。其它轴的姿态将由系统确定,对用户来说,不是很容易地就能识别。
(2) 6D: 所有3个轴的姿态都将告知机器人控制系统。测量说明确定 TCP时需要一个由机器人引导。
三、操作步骤
1、在主菜单中选择投入运行 > 测量 > 固定工具 > 工具。
2、为固定工具指定一个号码和一个名称。用继续键确认。
3、输入所用参考工具的编号。用继续键确认。
4、在5D/6D 栏中选择一种规格。用继续键确认。
5、用已测量工具的TCP移至固定工具的TCP。点击测量。用以确认位置。
6、如果选择了5D:将 +X 基坐标系平行对准 -Z 法兰坐标系。(也就是将连接法兰调整成与固定工具的作业方向垂直。)如果选择了6D:应对连接法兰进行调整,使得它的轴平行于固定工具的轴:
(1)+X 基坐标系平行于 -Z 法兰坐标系(也就是将连接法兰调整成与工具的作业方向垂直。)
(2) +Y 基坐标系平行于 +Y 法兰坐标系
(3) +Z 基坐标系平行于 +X 法兰坐标系
7、点击测量。 用是确认位置。
8、按下保存键。
- 上一篇:四轴机器人和六轴机器人 2017/12/26
- 下一篇:银河网站平台的驱动机构和驱动系统 2017/12/26